- PAGE SETTINGSClick on the gear to simplify view
- Settings

Lesson Plan
Overview
In this section we’ll learn how to use light sensors to program our robot to follow a light!
What You’ll Need
Before we get started, let’s make sure that we have all the parts.
- 1 x Arduino Uno Compatible Board
- 2 x Photoresistors
Demo Video
The Photoresistor
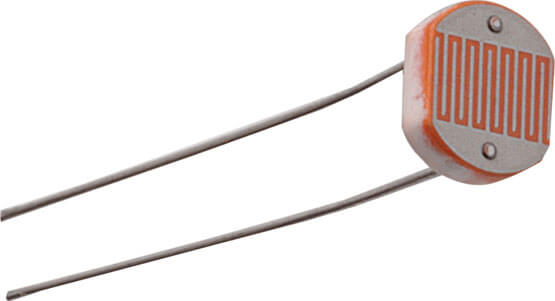
The photoresistor is a resistor that changes it’s resistance value based on the amount of light that it sees. We can use this characteristic to detect the intensity of light!
The photoresistor has two legs,and both of them are the same (i.e. it doesn’t matter which way you connect it.)
Wiring The Photoresistors
Let’s wire two photo resistors so that we can use them to program our Barnabas Rover to follow a light!
We will be connecting the photoresistors between analog inputs and GND.
| Left Photoresistor | Arduino-Uno Compatible Board |
|---|---|
| Leg #1 | A0 |
| Leg #2 | GND |
| Right Photoresistor | Arduino-Uno Compatible Board |
|---|---|
| Leg #1 | A1 |
| Leg #2 | GND |
Code A Single Photoresistor to Control Movement
In the video below we will find out the light/dark values for our photoresistor and code our car to move when a light is on and stop when the light is off.
int motb_pin1 = 3;
int motb_pin2 = 11;
int mota_pin1 = 9;
int mota_pin2 = 10;
int button_pin = 2;
int trig_pin = 4;
int echo_pin = 5;
void setup() {
//-Control Motor B
pinMode(motb_pin1,OUTPUT);
pinMode(motb_pin2,OUTPUT);
//-Control Motor A
pinMode(mota_pin1,OUTPUT);
pinMode(mota_pin2,OUTPUT);
//- button
pinMode(button_pin,INPUT_PULLUP);
//-ultrasonic pin
pinMode(trig_pin,OUTPUT);
pinMode(echo_pin,INPUT);
Serial.begin(9600);
}
//-sends sound out and receives sound
//-returns the distance in centimeters
int ultrasonic() {
long time;
float distance;
//-trigger a sound
// send out trigger signal
digitalWrite(trig_pin, LOW);
delayMicroseconds(2);
digitalWrite(trig_pin, HIGH);
delayMicroseconds(20);
digitalWrite(trig_pin, LOW);
//- a sound has gone out!!
//- wait for a sound to come back
time = pulseIn(echo_pin, HIGH);
//- calculate the distance in centimeters
distance = 0.01715 * time;
return distance;
}
//- turn 90 degrees
void turnRight() {
//- motor b is stopped
analogWrite(motb_pin1,0);
analogWrite(motb_pin2,0);
//- motor a moves forward
analogWrite(mota_pin1,255);
analogWrite(mota_pin2,0);
delay(600);
//- stop motor a
analogWrite(mota_pin1,0);
analogWrite(mota_pin2,0);
}
void tankTurn(int speeda, int speedb) {
//- motor a moves ... backwards
analogWrite(mota_pin1,0);
analogWrite(mota_pin2,speeda);
//- motor b moves forward
analogWrite(motb_pin1,0);
analogWrite(motb_pin2,speedb);
delay(1650);
//- stop both motors
stop();
}
void turnAround(int speeda, int speedb) {
//- motor a is stopped
analogWrite(mota_pin1,0);
analogWrite(mota_pin2,0);
//- motor b moves forward
analogWrite(motb_pin1,0);
analogWrite(motb_pin2,speedb);
delay(1650);
//- stop motor b
analogWrite(motb_pin1,0);
analogWrite(motb_pin2,0);
}
void turnLeft() {
//- motor a is stopped
analogWrite(mota_pin1,0);
analogWrite(mota_pin2,0);
//- motor b moves forward
analogWrite(motb_pin1,0);
analogWrite(motb_pin2,255);
delay(800);
//- stop motor b
analogWrite(motb_pin1,0);
analogWrite(motb_pin2,0);
}
void stop() {
//- motor a
analogWrite(mota_pin1,255);
analogWrite(mota_pin2,255);
//- motor b
analogWrite(motb_pin1,255);
analogWrite(motb_pin2,255);
}
void moveToWall(int speeda, int speedb) {
//- move forward!
//- motor a
analogWrite(mota_pin1,speeda);
analogWrite(mota_pin2,0);
//- motor b
analogWrite(motb_pin1,0);
analogWrite(motb_pin2,speedb);
//-stop when you hit a wall!!
int distance = ultrasonic();
while (distance > 5) {
//-do nothing except check distance
distance = ultrasonic();
}
stop();
}
void moveForward_no_distance(int speeda, int speedb) {
//- motor a
analogWrite(mota_pin1,speeda);
analogWrite(mota_pin2,0);
//- motor b
analogWrite(motb_pin1,0);
analogWrite(motb_pin2,speedb);
}
void moveForward(int speeda, int speedb, int inches) {
int myDelay;
//- motor a
analogWrite(mota_pin1,speeda);
analogWrite(mota_pin2,0);
//- motor b
analogWrite(motb_pin1,0);
analogWrite(motb_pin2,speedb);
//- move forward the distance in inches
myDelay = inches*125;
delay(myDelay);
//- stop
stop();
}
void moveBackward(int speeda, int speedb) {
//- motor a
analogWrite(mota_pin1,0);
analogWrite(mota_pin2,speeda);
//- motor b
analogWrite(motb_pin1,speedb);
analogWrite(motb_pin2,0);
}
void loop() {
Serial.println(analogRead(A0));
delay(100);
if (analogRead(A0) < 110) {
moveForward_no_distance(200,200);
}
else if (analogRead(A0) > 110) {
stop();
}
}
Extra Challenges
- Move forward when light is on, move backward when the light is off
- When you push the button, the car moves forward. And whenever you shine a light on the photoresistor, turn right
Coding Light Following (Two Photoresistors)
Now let’s code two photoresistors to code our rover to follow a light!
int motb_pin1 = 3;
int motb_pin2 = 11;
int mota_pin1 = 9;
int mota_pin2 = 10;
int button_pin = 2;
int trig_pin = 4;
int echo_pin = 5;
void setup() {
//-Control Motor B
pinMode(motb_pin1,OUTPUT);
pinMode(motb_pin2,OUTPUT);
//-Control Motor A
pinMode(mota_pin1,OUTPUT);
pinMode(mota_pin2,OUTPUT);
//- button
pinMode(button_pin,INPUT_PULLUP);
//-ultrasonic pin
pinMode(trig_pin,OUTPUT);
pinMode(echo_pin,INPUT);
//- photoresistor pin
pinMode(A0,INPUT_PULLUP);
pinMode(A1,INPUT_PULLUP);
Serial.begin(9600);
}
//-sends sound out and receives sound
//-returns the distance in centimeters
int ultrasonic() {
long time;
float distance;
//-trigger a sound
// send out trigger signal
digitalWrite(trig_pin, LOW);
delayMicroseconds(2);
digitalWrite(trig_pin, HIGH);
delayMicroseconds(20);
digitalWrite(trig_pin, LOW);
//- a sound has gone out!!
//- wait for a sound to come back
time = pulseIn(echo_pin, HIGH);
//- calculate the distance in centimeters
distance = 0.01715 * time;
return distance;
}
//- turn 90 degrees
void turnRight() {
//- motor b is stopped
analogWrite(motb_pin1,0);
analogWrite(motb_pin2,0);
//- motor a moves forward
analogWrite(mota_pin1,255);
analogWrite(mota_pin2,0);
delay(200);
//delay(600);
//- stop motor a
analogWrite(mota_pin1,0);
analogWrite(mota_pin2,0);
}
void tankTurn(int speeda, int speedb) {
//- motor a moves ... backwards
analogWrite(mota_pin1,0);
analogWrite(mota_pin2,speeda);
//- motor b moves forward
analogWrite(motb_pin1,0);
analogWrite(motb_pin2,speedb);
delay(1650);
//- stop both motors
stop();
}
void turnAround(int speeda, int speedb) {
//- motor a is stopped
analogWrite(mota_pin1,0);
analogWrite(mota_pin2,0);
//- motor b moves forward
analogWrite(motb_pin1,0);
analogWrite(motb_pin2,speedb);
delay(1650);
//- stop motor b
analogWrite(motb_pin1,0);
analogWrite(motb_pin2,0);
}
void turnLeft() {
//- motor a is stopped
analogWrite(mota_pin1,0);
analogWrite(mota_pin2,0);
//- motor b moves forward
analogWrite(motb_pin1,0);
analogWrite(motb_pin2,255);
delay(200);
//delay(800);
//- stop motor b
analogWrite(motb_pin1,0);
analogWrite(motb_pin2,0);
}
void stop() {
//- motor a
analogWrite(mota_pin1,255);
analogWrite(mota_pin2,255);
//- motor b
analogWrite(motb_pin1,255);
analogWrite(motb_pin2,255);
}
void moveToWall(int speeda, int speedb) {
//- move forward!
//- motor a
analogWrite(mota_pin1,speeda);
analogWrite(mota_pin2,0);
//- motor b
analogWrite(motb_pin1,0);
analogWrite(motb_pin2,speedb);
//-stop when you hit a wall!!
int distance = ultrasonic();
while (distance > 5) {
//-do nothing except check distance
distance = ultrasonic();
}
//-stop!!!
stop();
}
void moveForward_no_distance(int speeda, int speedb) {
//- motor a
analogWrite(mota_pin1,speeda);
analogWrite(mota_pin2,0);
//- motor b
analogWrite(motb_pin1,0);
analogWrite(motb_pin2,speedb);
}
void moveForward(int speeda, int speedb, int inches) {
int myDelay;
//- motor a
analogWrite(mota_pin1,speeda);
analogWrite(mota_pin2,0);
//- motor b
analogWrite(motb_pin1,0);
analogWrite(motb_pin2,speedb);
//- move forward the distance in inches
myDelay = inches*125;
delay(myDelay);
//- stop
stop();
}
void moveBackward(int speeda, int speedb) {
//- motor a
analogWrite(mota_pin1,0);
analogWrite(mota_pin2,speeda);
//- motor b
analogWrite(motb_pin1,speedb);
analogWrite(motb_pin2,0);
}
void loop() {
Serial.println(analogRead(A1));
delay(100);
//- if the A1 light is on, move the left wheel forward
if (analogRead(A1) < 30) {
//-move the left wheel forward
turnRight();
}
else {
//-stop the left wheel
}
//- if the A0 light is on, move the right wheel forward
if (analogRead(A0) < 45) {
turnLeft();
}
else {
}