- PAGE SETTINGSClick on the gear to simplify view
- Settings

Lesson Plan
Overview
In this lesson you’ll be challenged to program your robot through a series of challenges
Navigation Review
There And Back Challenge
Now that we have built a library of subroutines, we can take what we have learned to perform a task.
Let’s try the “There And Back” Challenge. See the diagram below and see if you can make your robot go to the cone and come back.
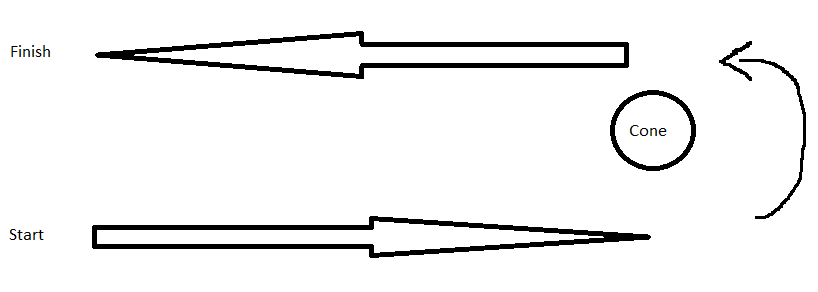
Some things to keep in mind during this challenge:
- You will need to adjust the delay delay on the forward subroutine to determine how long your car goes forward before it turns.
- The turns will likely need to be two separate 90 degree turns.
Box Challenge
Find a box and have your robot travel around it.
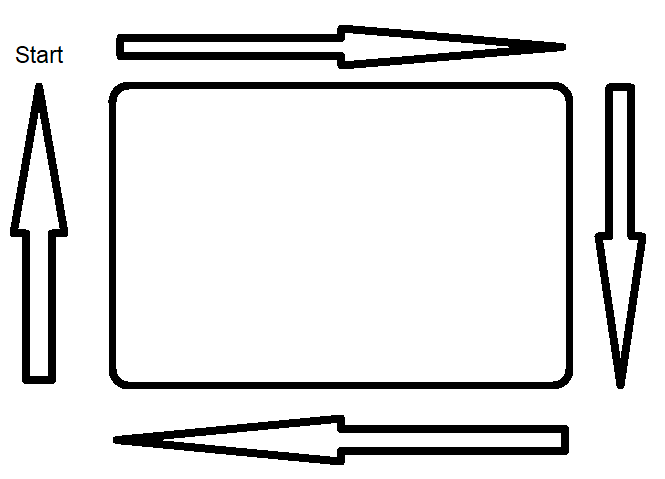
Some things to keep in mind during this challenge:
- Like the previous challenge the appropriate delays for forward and turn will take experimentation to find.
- There are multiple ways to complete this challenge. For example, you can closely follow the outside of the box and make sharp turns, or you can create a large arcing circle around the box that doesn’t come remotely close to it.
Alternative Surface Challenge
Challenge your Barnabas Racer to travel on a path that crosses different types of surfaces.
Letters Challenge
Let’s take it up a notch. See if you can program your car to travel along the ground to create the following letters below. You could even try attaching a pen to your robot and see if it can draw the letters!
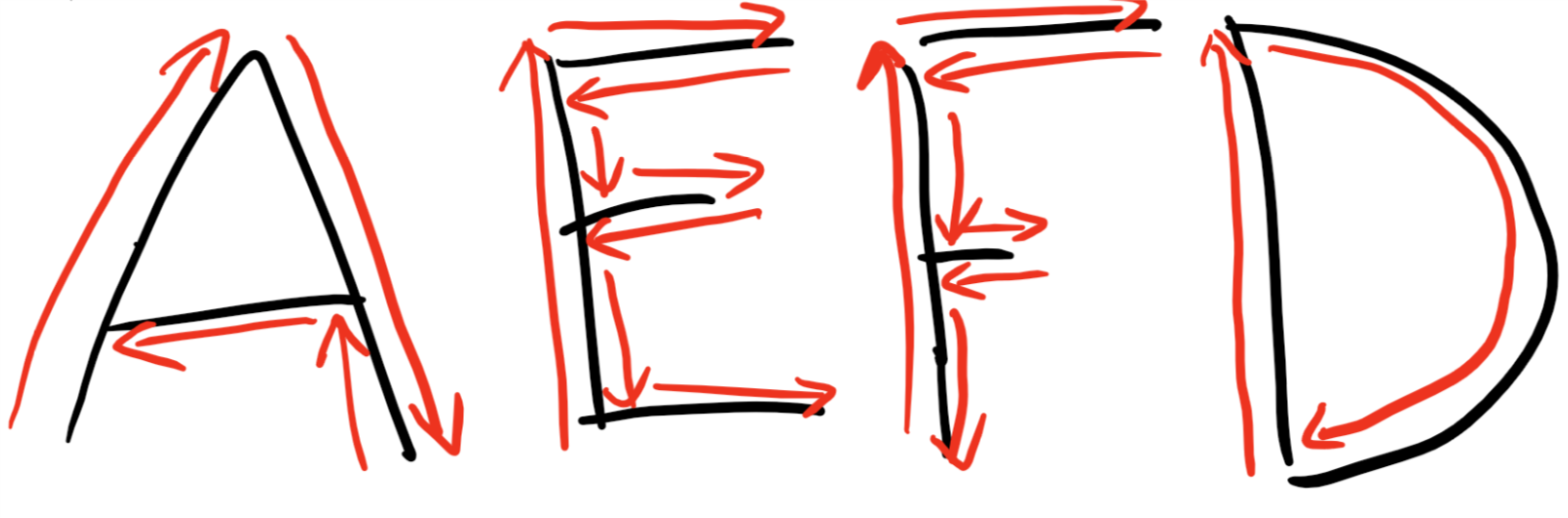
- Draw the letters A, E, F and D on a piece of paper and see if your car can drive along it.
- See the red arrows for the path that your car should travel.
Some things to keep in mind during this challenge:
- How would you make your car move in an arc to draw the “D”? Hint: It has something to do with adjusting the motor speeds.
Choose Your Own Adventure
Challenge yourself to design your own course and program your Barnabas Racer to get through it!