ETS1.B: Developing Possible Solutions: Tests are often designed to identify failure points or difficulties, which suggest the elements of the design that need to be improved. (3-5-ETS1-3)
At whatever stage, communicating with peers about proposed solutions is an important part of the design process, and shared ideas can lead to improved designs. (3-5-ETS1-2)
Science is a Human Endeavor: Most scientists and engineers work in teams. (4-PS3-4)
Learning Target(s)
Technical Skills
Fine motor skills
Following a procedure
Life Skills
Perseverance
Teamwork
Essential Question(s)
Key Vocabulary
Fastener
Depth of Knowledge Levels Addressed
Level 1: Recall and Reproduction
Level 2: Skills and Concepts
Level 3: Strategic Thinking and Reasoning
Level 4: Extended Thinking
Barriers to Learning
Fine motor skills and patience
Anticipatory Set
Students will assemble the robot
Independent Practice
Following step by step instructions to assemble the robot.
Final Assessment, project or product
Completed robot with head and arms connected to servo motors
Servos motors are used to move your robot’s right arm, left arm, and head. Servo motors can move a half-circle (or 180 degrees). Follow the below steps to attach the servo motors:
Take one servo motor and place it into the left arm socket of the robot body. Note: The servo motor should be placed inside of the plastic robot body casing. The top of the motor (with the white plastic tip) will stick slightly out of the robot’s body. (See photo.)
Take one 9/16” servo screw and put it through the outside of the body and into the corresponding hole on the wing of the servo motor. Push it through so that you can see the screw stick out through the wing of the servo motor. If you have trouble sticking the screw through, try using the screwdriver to screw it in.
Take a nut and place it over the tip of the 9/16” servo screw. Then, while gently holding the nut in place with your finger, tighten the 9/16” servo screw using your screwdriver. (Be careful not to over tighten.) (This may require some patience and perseverance. But you can do it!)
Once your nut is secure on your servo screw, it should look like the photo.
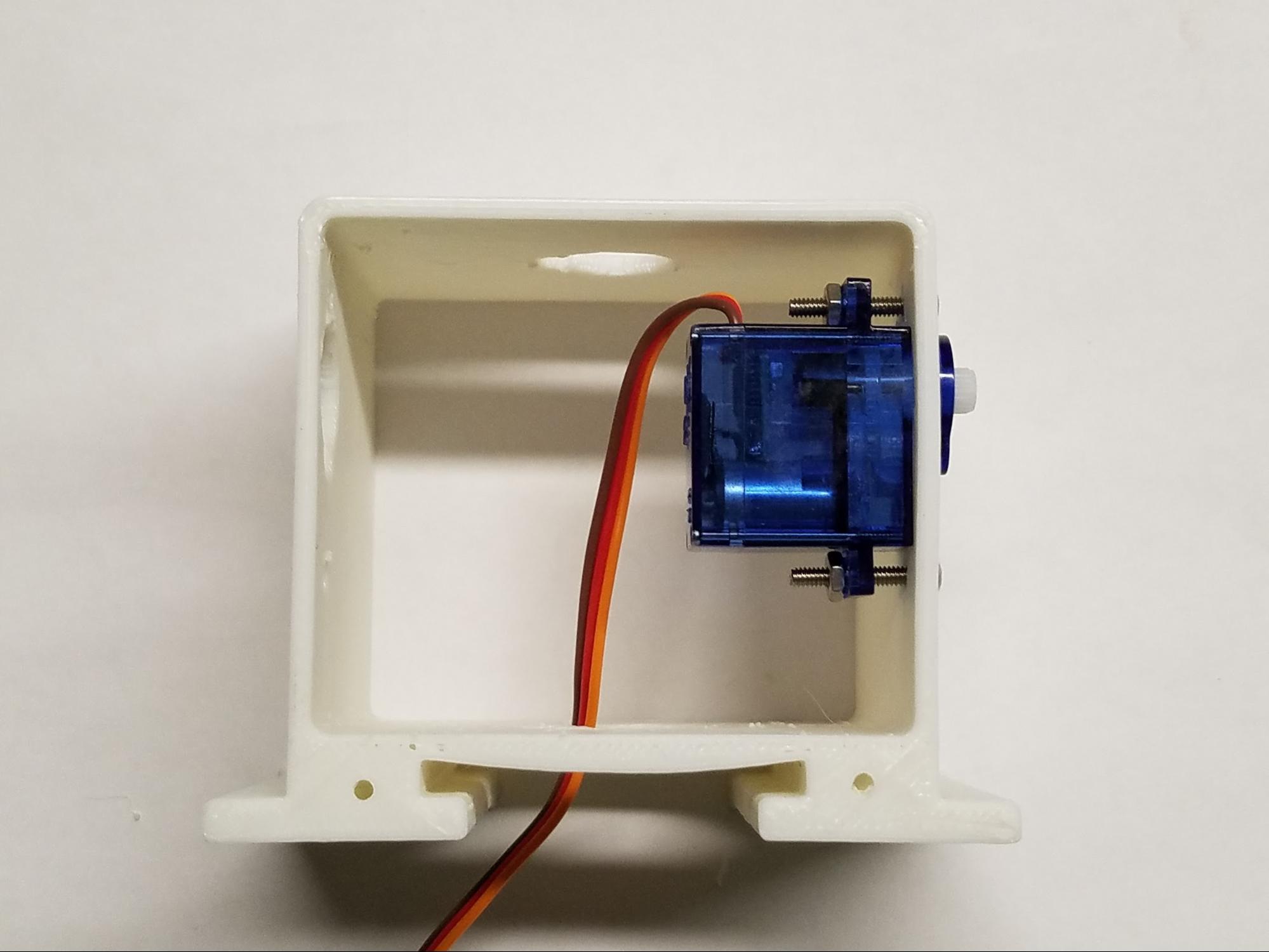
Repeat the above instructions for the other wing of the servo motor. Once completed, your servo motor should look like the photo.
Now, repeat the above steps for the other arm hole. Once you have finished, your robot’s body should look like the photo below.
Now that your two arm motors are assembled, take the last servo motor and fit it into the third servo motor socket on the top of the robot body. This third motor will be for your robot’s head. Repeat the steps above to attach this third servo motor to your robot body.
Once completed, your robot should look like this.
Vocabulary
Fastener: a hardware device that mechanically joins or affixes two or more objects together.
Step 2: Frontplate Assembly
In this step, you will now cover your robot’s motors by installing your faceplate by following the steps below:
Find the front of your robot body. (Hint: It is the open side of the body that is closest to the arm motors and has 2 holes at the bottom.) Align your faceplate to your robot’s body so the screw holes line up. (See photo.)
Using your miniature Phillips screwdriver, fasten the two 1/4” screws to the robot’s body.
Once completed, your robot should look like the photo.
Step 3: Attaching The Backplate
In this step, you will now cover the backside of your robot’s body by installing your Barnabas Noggin. Follow the step below:
Find the back of your robot. (Hint: It is the open side of the body that is furthest from the arm motors with 4 holes.) Align your Barnabas Noggin to your robot’s body. The screw holes on the four corners of the robot body and the Barnabas Noggin should line up. (See photo.)
Next, screw in the four 1/4” screws into the four holes using your screwdriver.
Once completed, your robot should look like the photo.
Step 4: Attaching The Arms
Now you will connect your arms to your robot’s body by following the steps below:
Take one 9/16” servo screw and put it through one of the arm’s holes. Screw on one nut to the other side of the servo screw–but only part of the way. Be careful not to screw the nut in all the way. (See photo.)
Take the arm and hold it up to the servo motor shaft (i.e. white plastic tip of the servo motor) as shown below. The hole in the arm should match up with the hole on the servo motor shaft.
Next, using the screwdriver, tighten your servo screw by turning clockwise. (Be careful not to over tighten.) (See photo.)
Once the arm is tightened, it should look like the photo.
Now, repeat the process above for the other arm too. Once you are finished, your robot arms should look like the photo.
Step 5: Attaching The Head
Every robot needs a head! You will be fastening the head to the servo motor sticking out of the top of the robot as described below:
Find the bottom of your head (i.e. the base) and align the hole to the top of the hole on the servo motor shaft head. (See photo.)
Fasten the screw.
Now fasten the top of the head to the bottom part. It should fit in over the top. You may want to use glue (Elmer’s glue or super glue) to secure it further.
The typical message of perseverance is particularly relevant this lesson as the need for fine motor skills often frustrates students. This is something as a teacher to be aware of.
REFLECTION
Why is fastening the motors from both sides important?

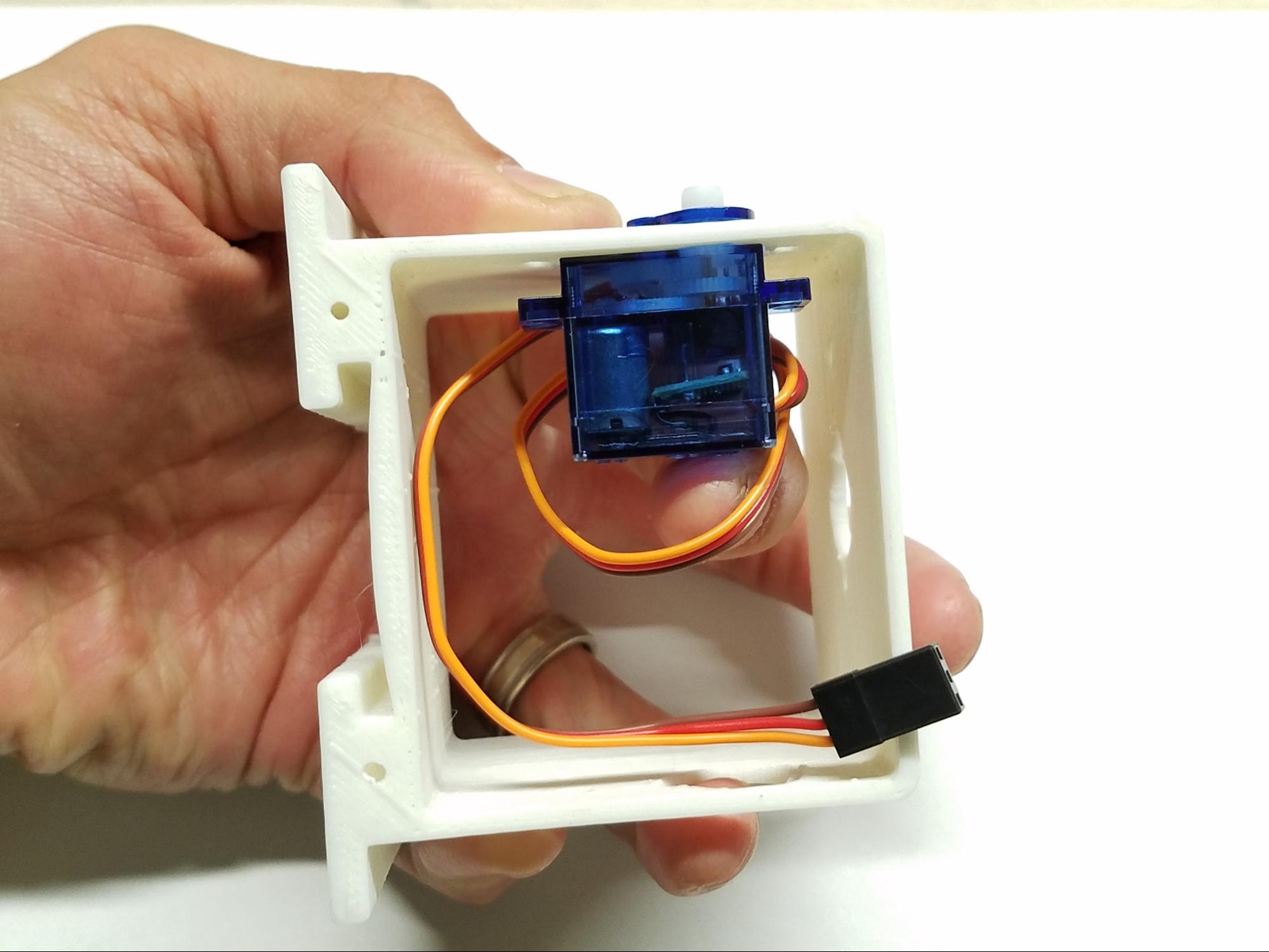 Take one servo motor and place it into the left arm socket of the robot body. Note: The servo motor should be placed inside of the plastic robot body casing. The top of the motor (with the white plastic tip) will stick slightly out of the robot’s body. (See photo.)
Take one servo motor and place it into the left arm socket of the robot body. Note: The servo motor should be placed inside of the plastic robot body casing. The top of the motor (with the white plastic tip) will stick slightly out of the robot’s body. (See photo.)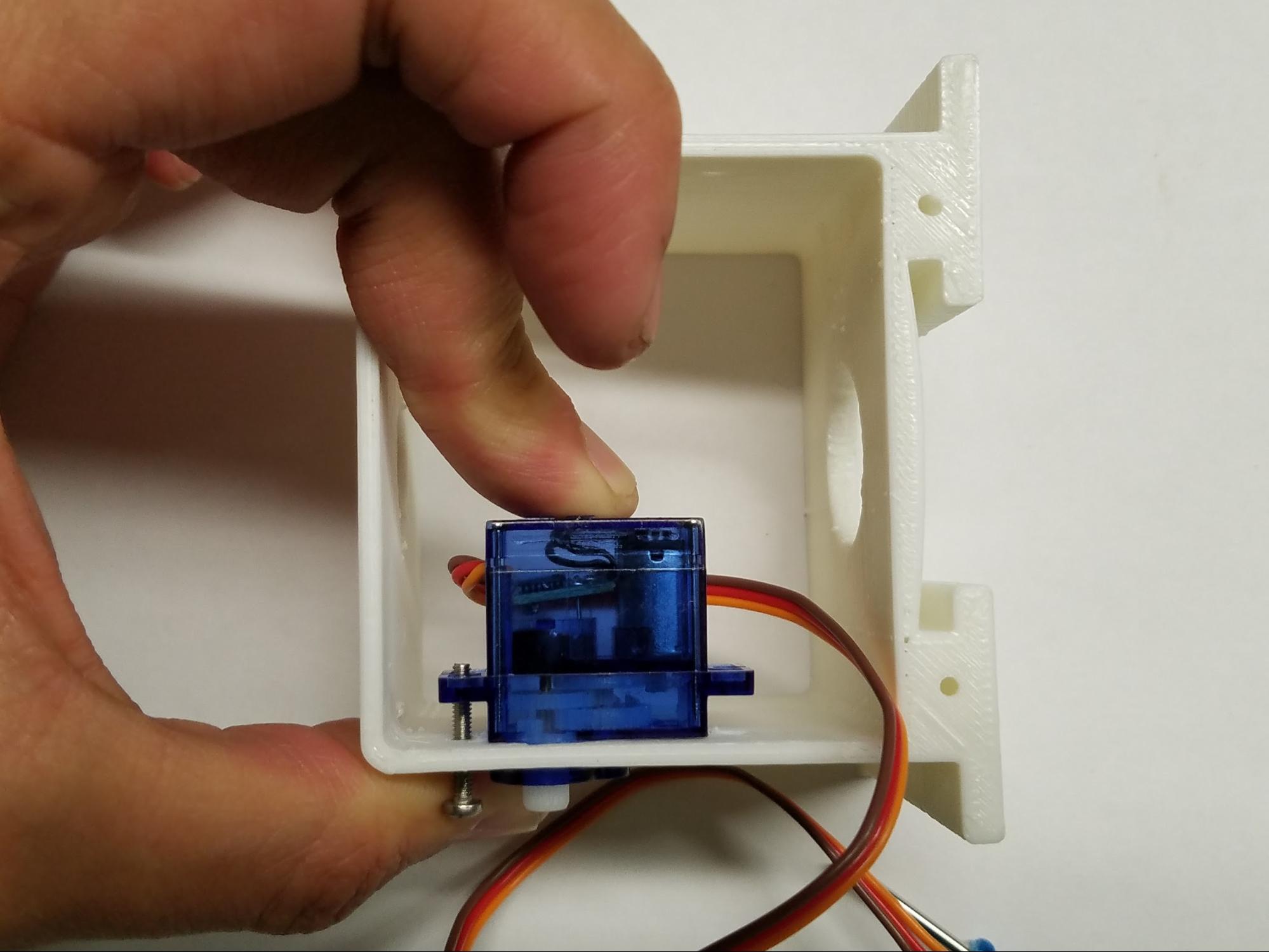 Take one 9/16” servo screw and put it through the outside of the body and into the corresponding hole on the wing of the servo motor. Push it through so that you can see the screw stick out through the wing of the servo motor. If you have trouble sticking the screw through, try using the screwdriver to screw it in.
Take one 9/16” servo screw and put it through the outside of the body and into the corresponding hole on the wing of the servo motor. Push it through so that you can see the screw stick out through the wing of the servo motor. If you have trouble sticking the screw through, try using the screwdriver to screw it in.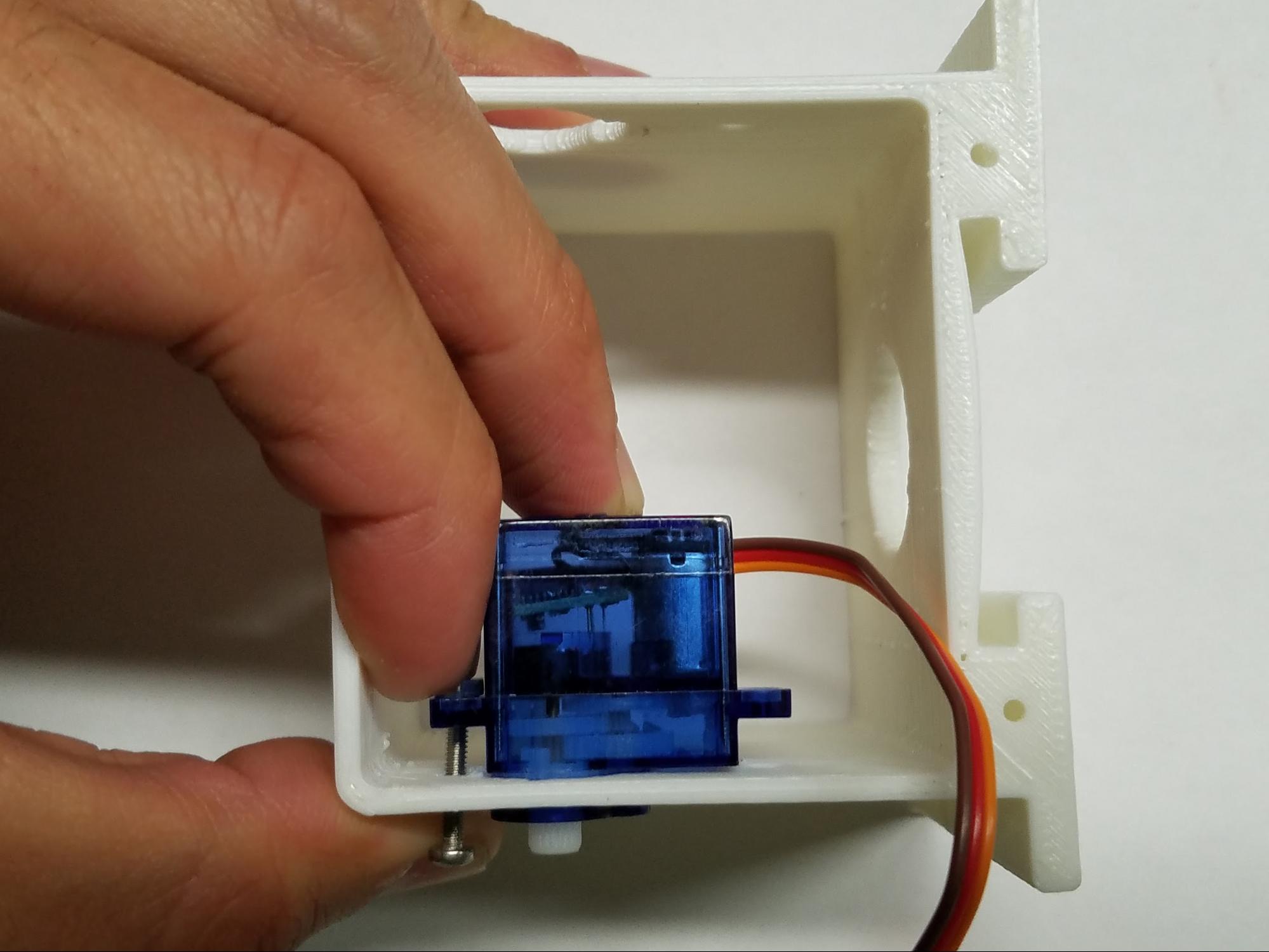 Take a nut and place it over the tip of the 9/16” servo screw. Then, while gently holding the nut in place with your finger, tighten the 9/16” servo screw using your screwdriver. (Be careful not to over tighten.) (This may require some patience and perseverance. But you can do it!)
Take a nut and place it over the tip of the 9/16” servo screw. Then, while gently holding the nut in place with your finger, tighten the 9/16” servo screw using your screwdriver. (Be careful not to over tighten.) (This may require some patience and perseverance. But you can do it!)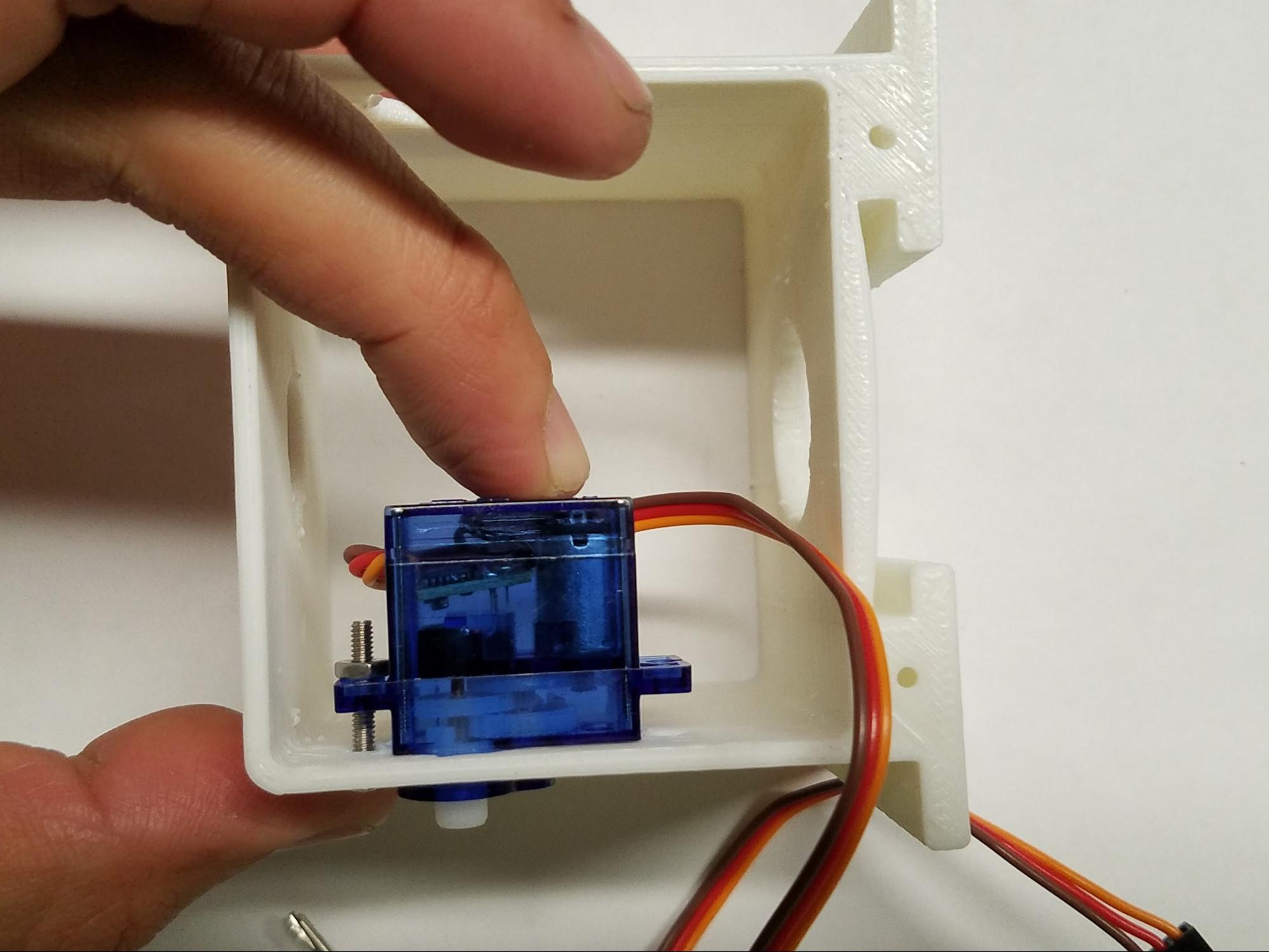
 Repeat the above instructions for the other wing of the servo motor. Once completed, your servo motor should look like the photo.
Repeat the above instructions for the other wing of the servo motor. Once completed, your servo motor should look like the photo.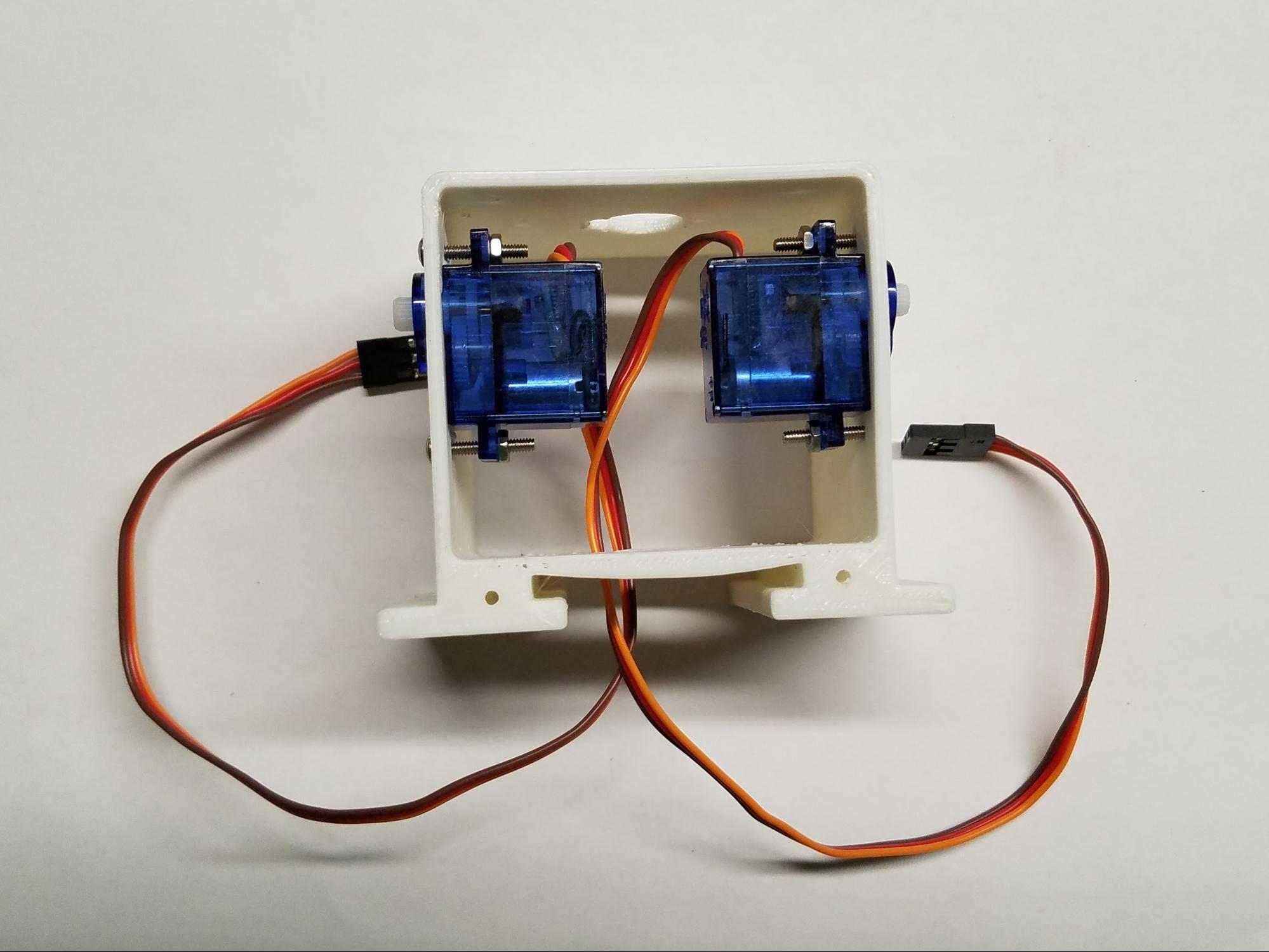 Now, repeat the above steps for the other arm hole. Once you have finished, your robot’s body should look like the photo below.
Now, repeat the above steps for the other arm hole. Once you have finished, your robot’s body should look like the photo below.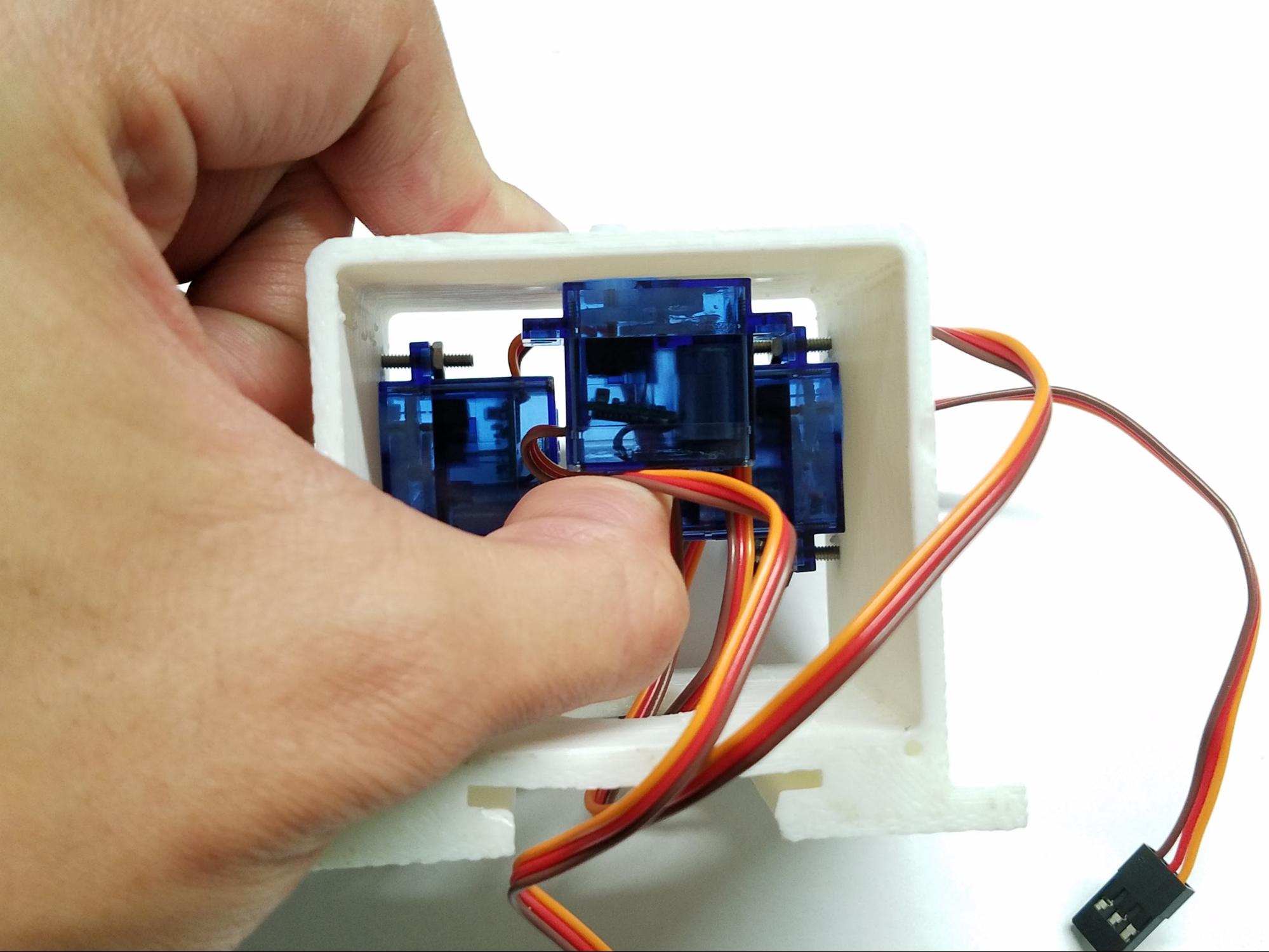 Now that your two arm motors are assembled, take the last servo motor and fit it into the third servo motor socket on the top of the robot body. This third motor will be for your robot’s head. Repeat the steps above to attach this third servo motor to your robot body.
Now that your two arm motors are assembled, take the last servo motor and fit it into the third servo motor socket on the top of the robot body. This third motor will be for your robot’s head. Repeat the steps above to attach this third servo motor to your robot body.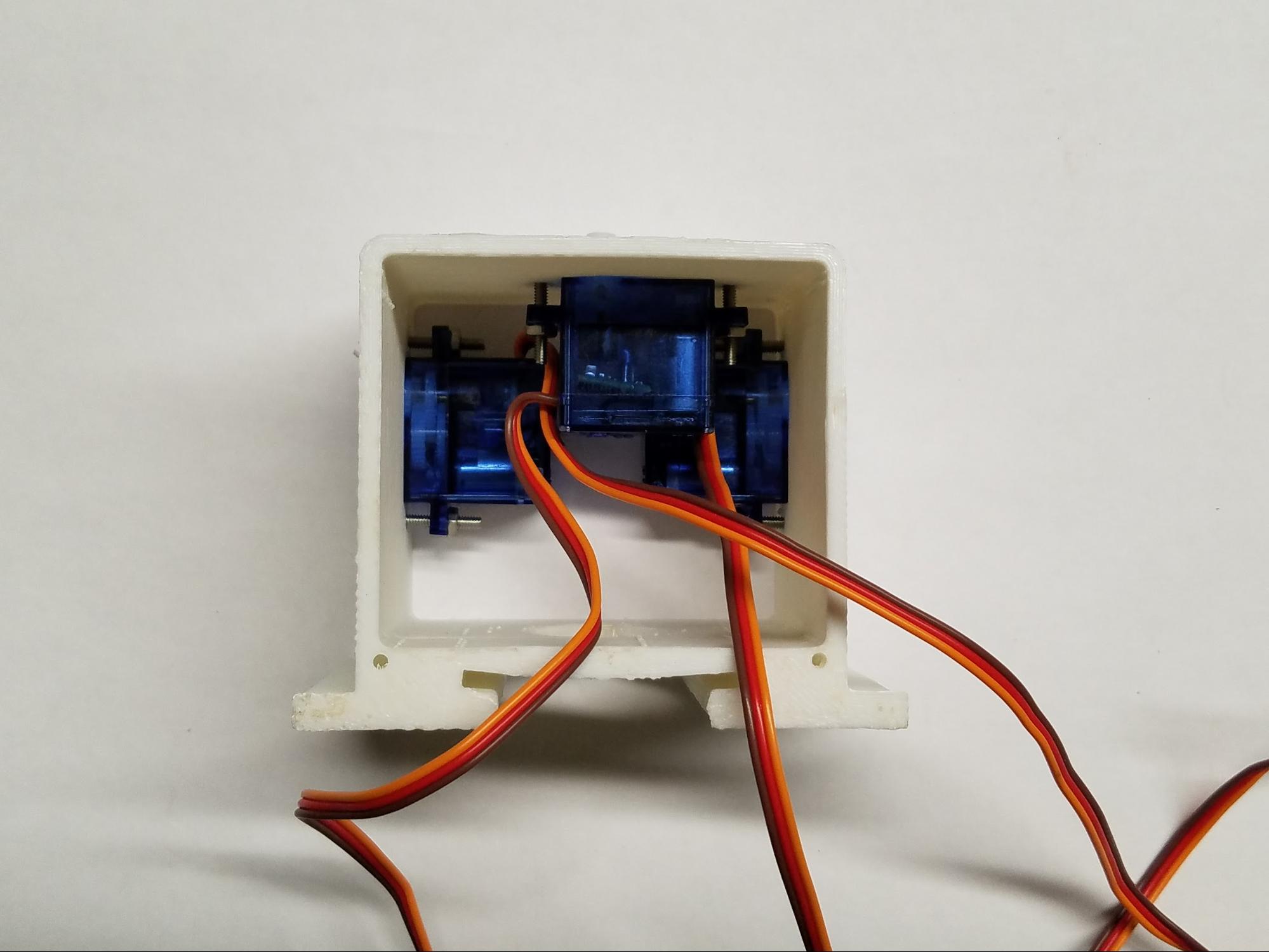 Once completed, your robot should look like this.
Once completed, your robot should look like this. Find the front of your robot body. (Hint: It is the open side of the body that is closest to the arm motors and has 2 holes at the bottom.) Align your faceplate to your robot’s body so the screw holes line up. (See photo.)
Find the front of your robot body. (Hint: It is the open side of the body that is closest to the arm motors and has 2 holes at the bottom.) Align your faceplate to your robot’s body so the screw holes line up. (See photo.)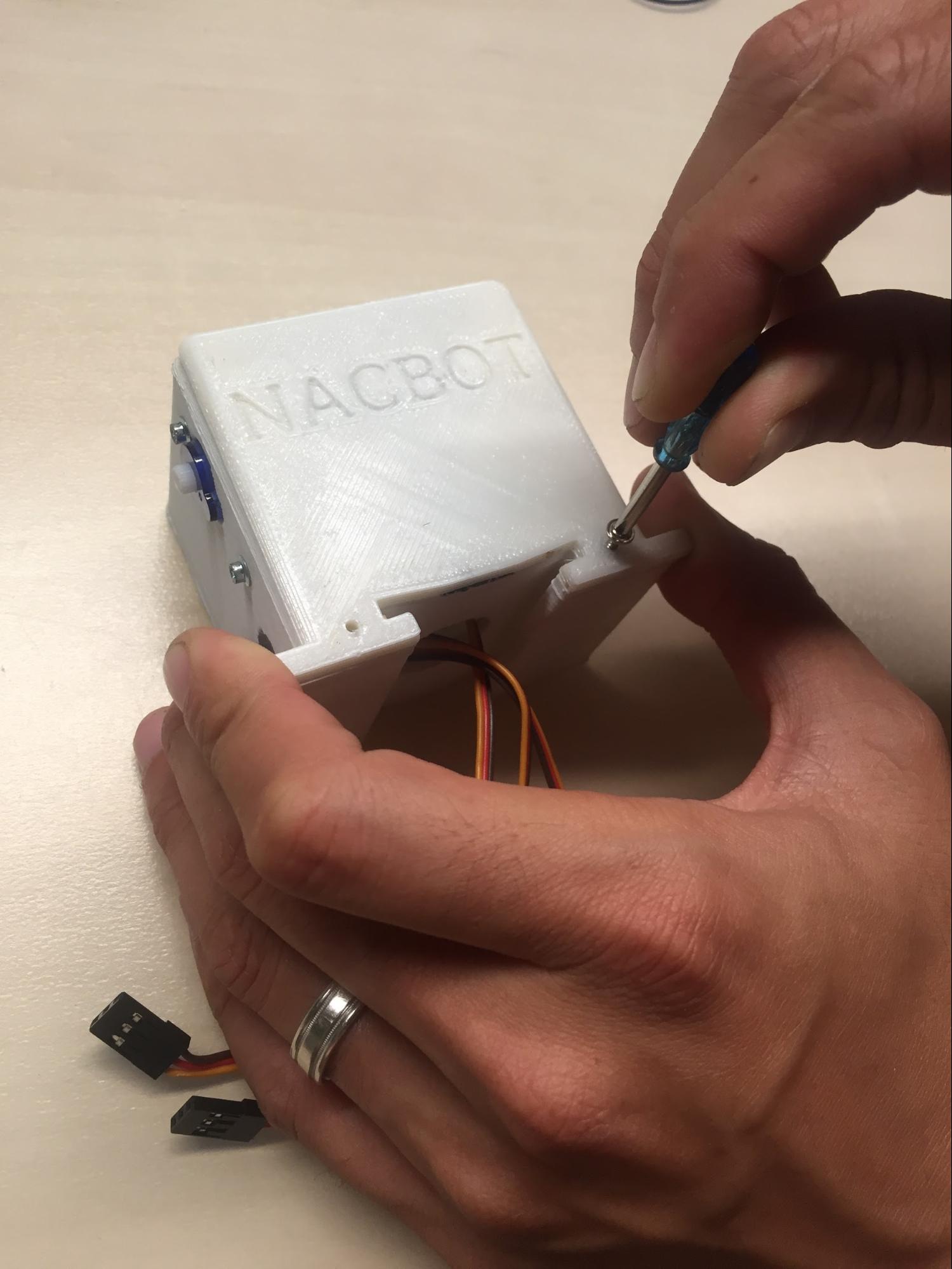 Using your miniature Phillips screwdriver, fasten the two 1/4” screws to the robot’s body.
Using your miniature Phillips screwdriver, fasten the two 1/4” screws to the robot’s body. Once completed, your robot should look like the photo.
Once completed, your robot should look like the photo.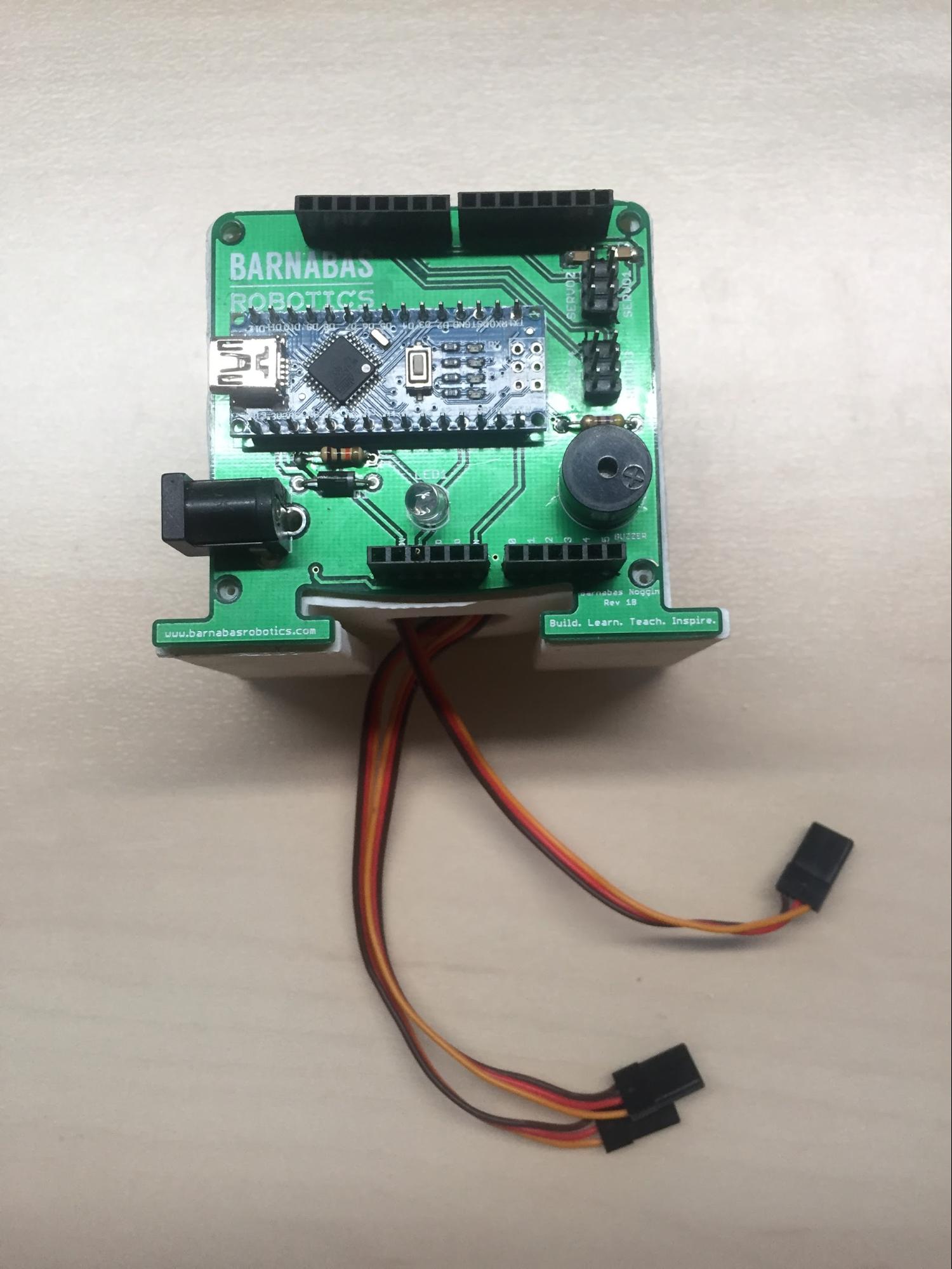 Find the back of your robot. (Hint: It is the open side of the body that is furthest from the arm motors with 4 holes.) Align your Barnabas Noggin to your robot’s body. The screw holes on the four corners of the robot body and the Barnabas Noggin should line up. (See photo.)
Find the back of your robot. (Hint: It is the open side of the body that is furthest from the arm motors with 4 holes.) Align your Barnabas Noggin to your robot’s body. The screw holes on the four corners of the robot body and the Barnabas Noggin should line up. (See photo.)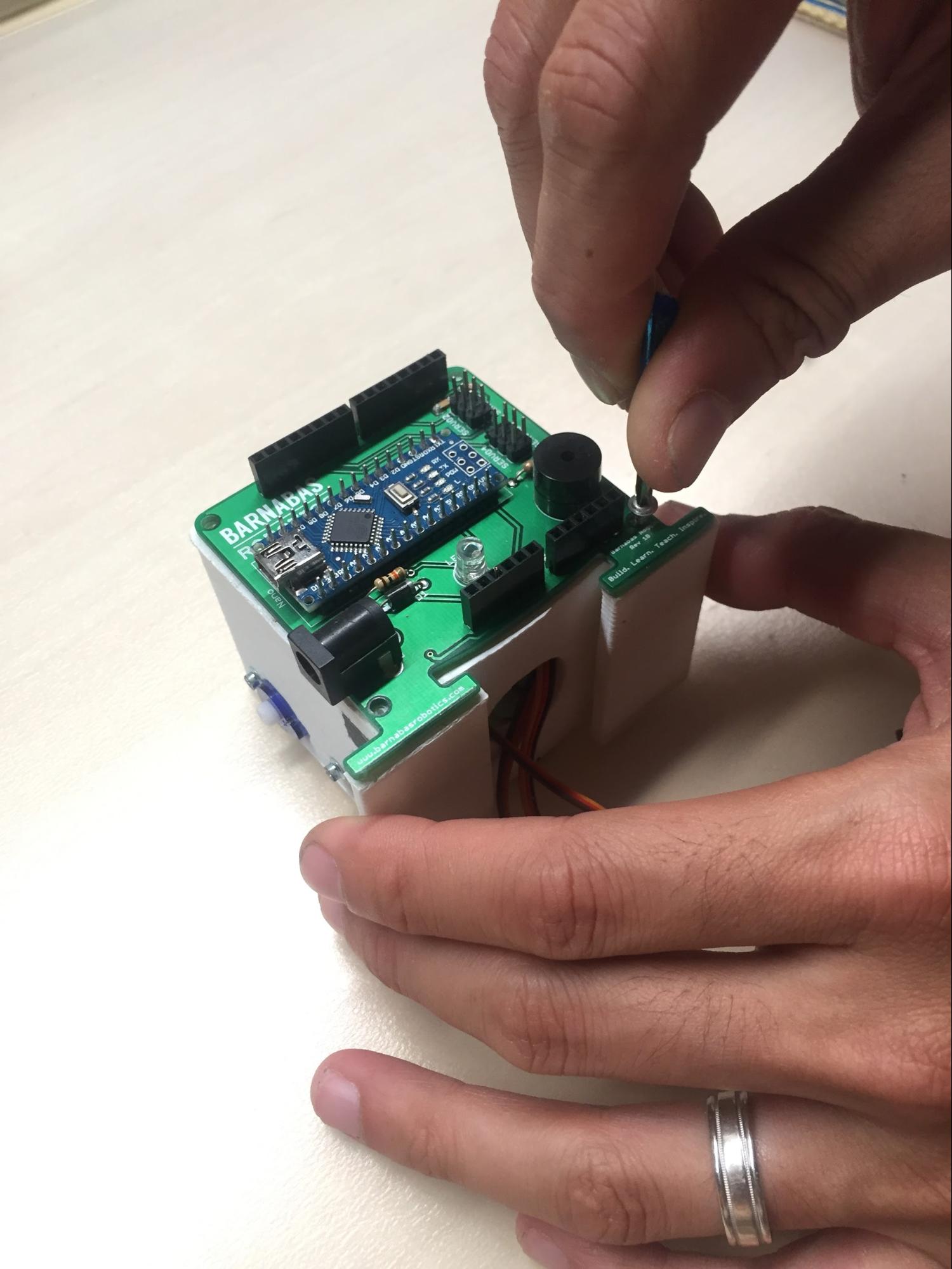 Next, screw in the four 1/4” screws into the four holes using your screwdriver.
Next, screw in the four 1/4” screws into the four holes using your screwdriver.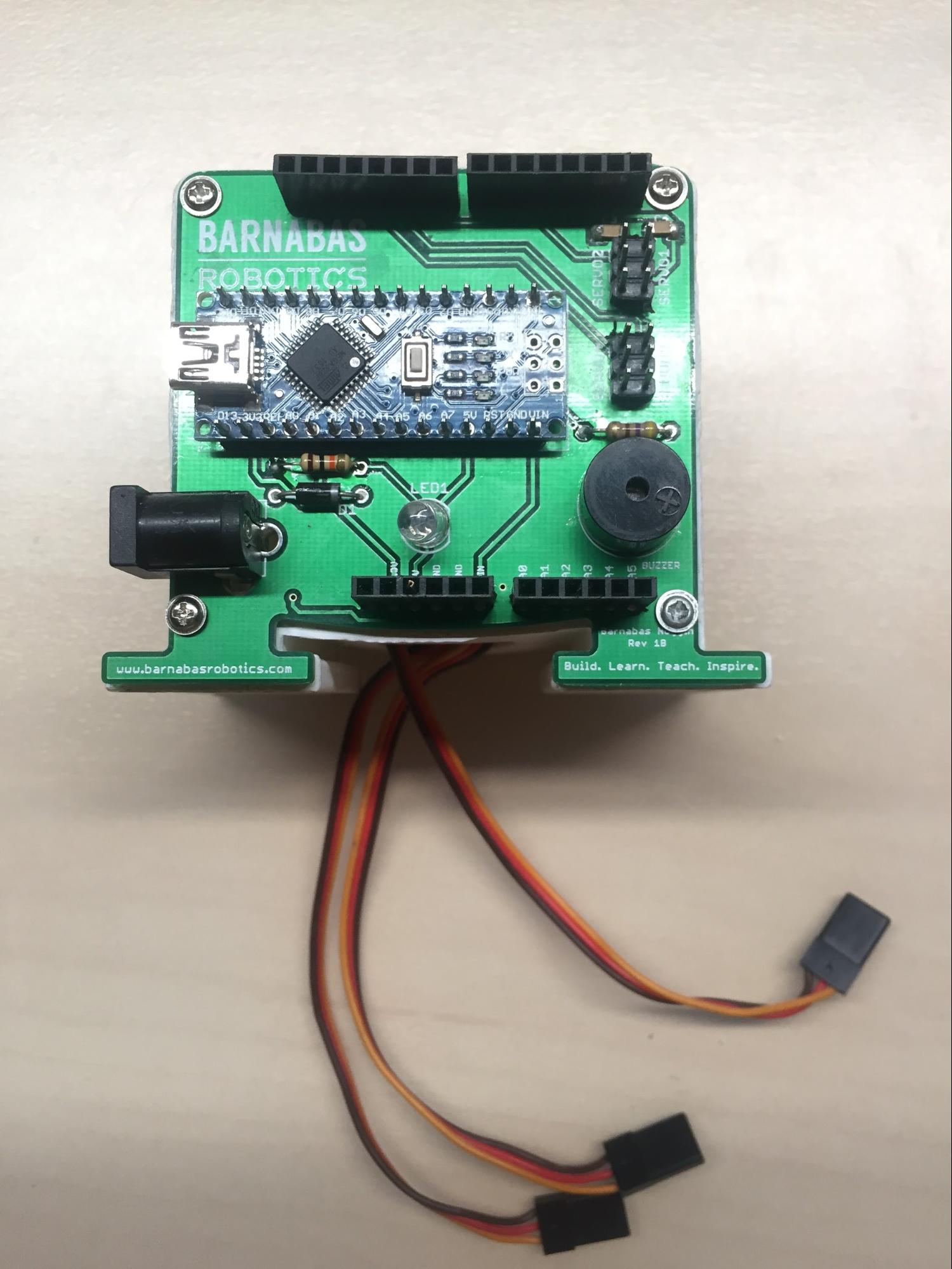 Once completed, your robot should look like the photo.
Once completed, your robot should look like the photo. Take one 9/16” servo screw and put it through one of the arm’s holes. Screw on one nut to the other side of the servo screw–but only part of the way. Be careful not to screw the nut in all the way. (See photo.)
Take one 9/16” servo screw and put it through one of the arm’s holes. Screw on one nut to the other side of the servo screw–but only part of the way. Be careful not to screw the nut in all the way. (See photo.)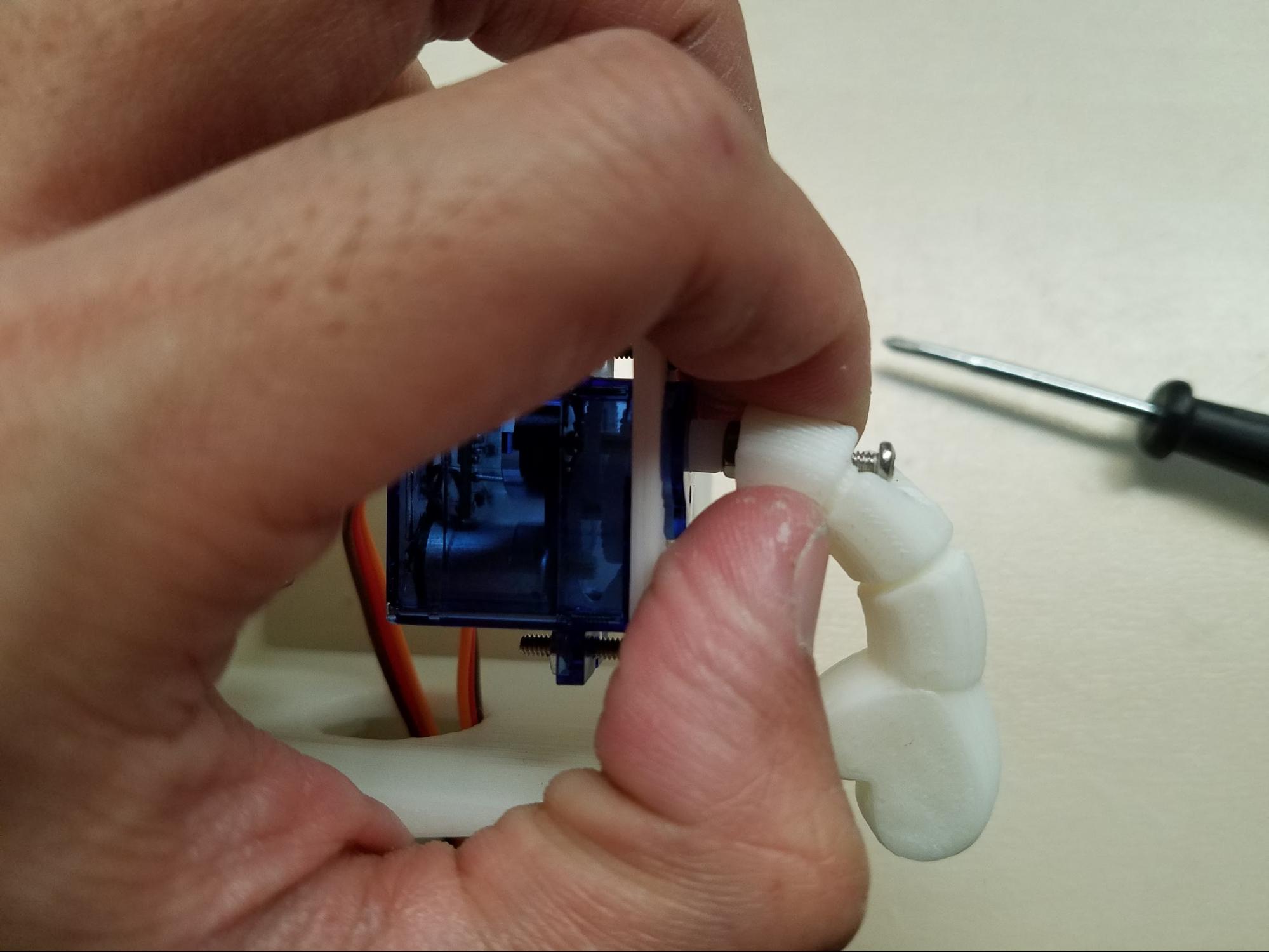 Take the arm and hold it up to the servo motor shaft (i.e. white plastic tip of the servo motor) as shown below. The hole in the arm should match up with the hole on the servo motor shaft.
Take the arm and hold it up to the servo motor shaft (i.e. white plastic tip of the servo motor) as shown below. The hole in the arm should match up with the hole on the servo motor shaft.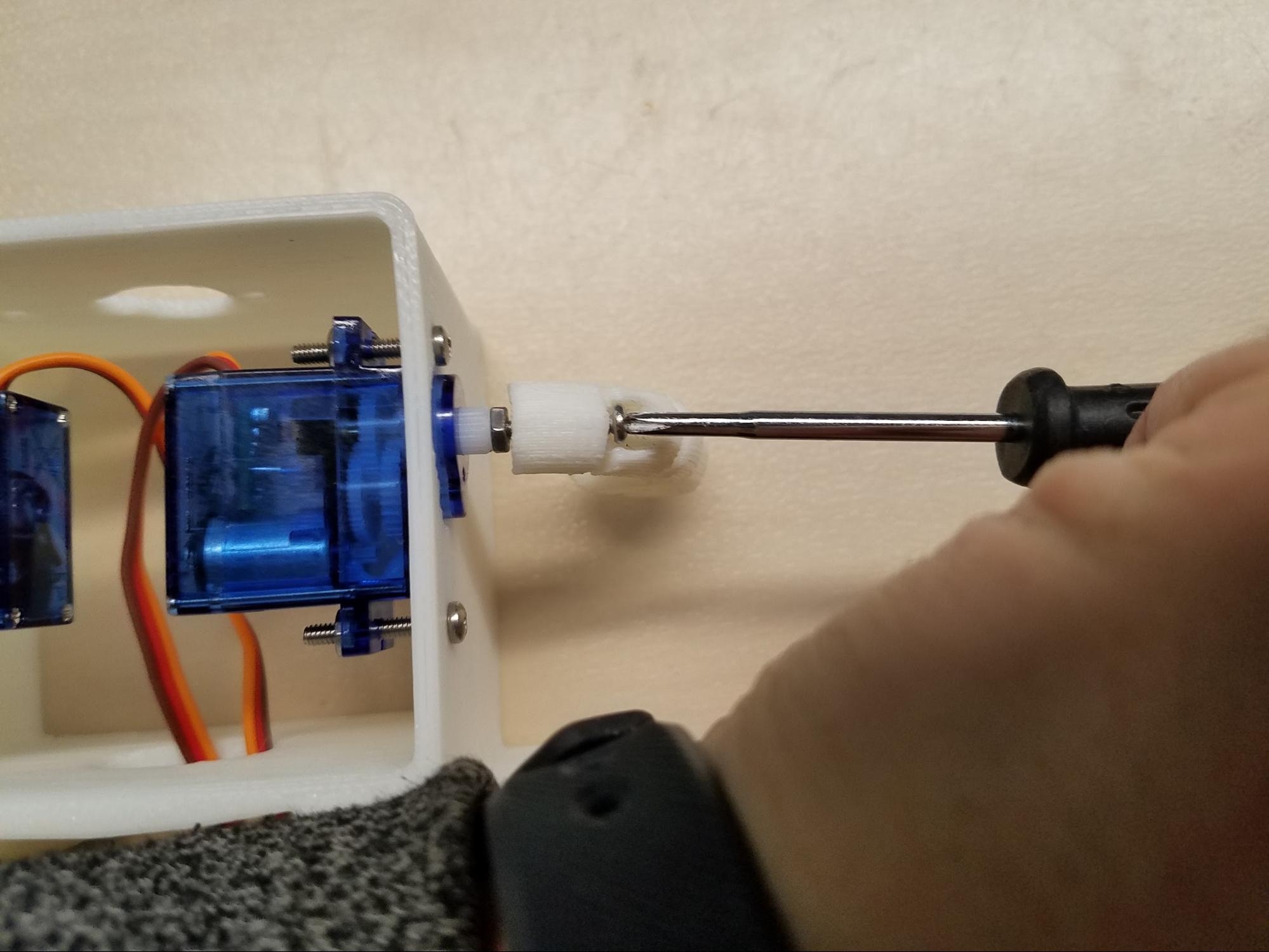 Next, using the screwdriver, tighten your servo screw by turning clockwise. (Be careful not to over tighten.) (See photo.)
Next, using the screwdriver, tighten your servo screw by turning clockwise. (Be careful not to over tighten.) (See photo.)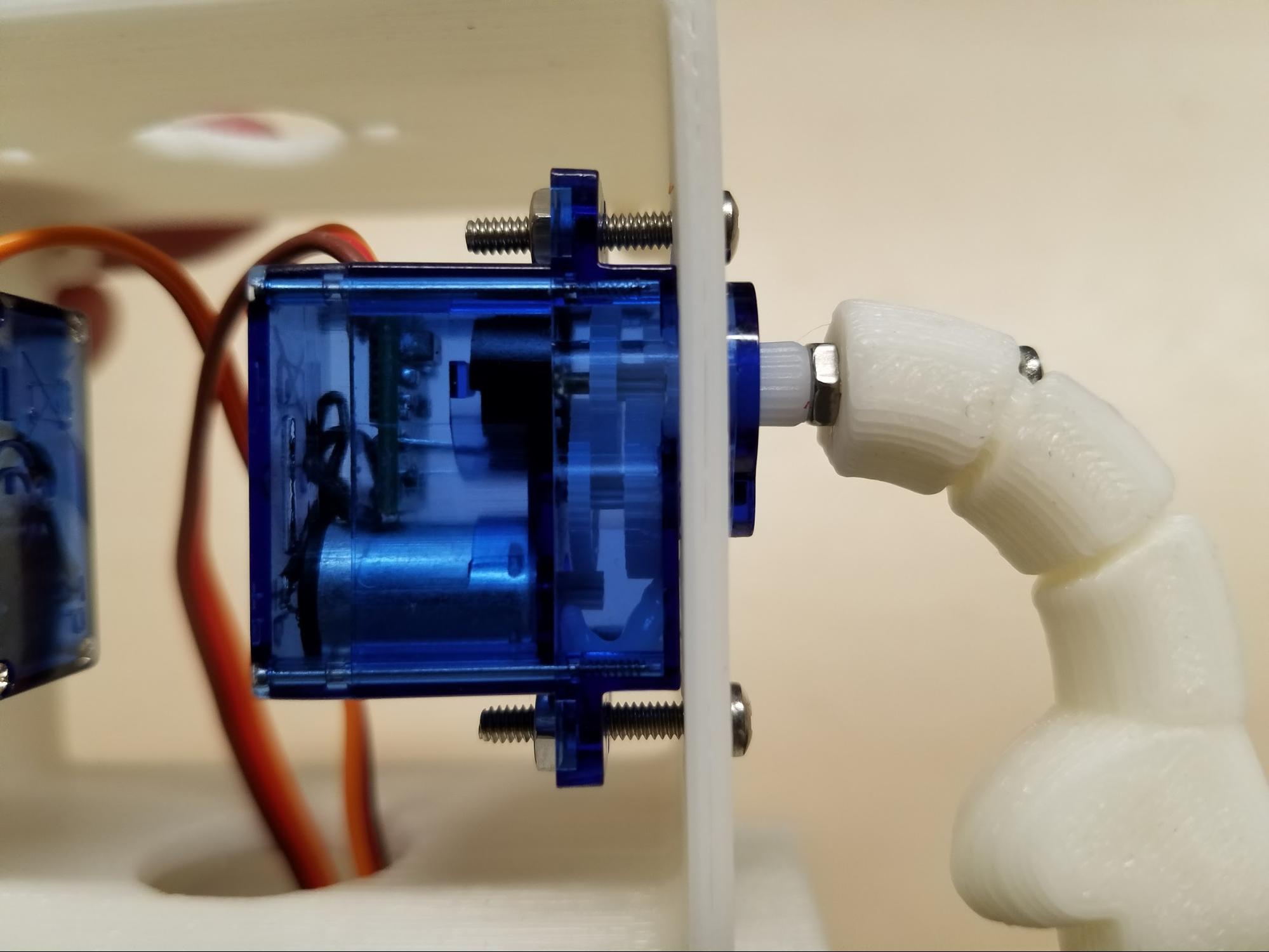 Once the arm is tightened, it should look like the photo.
Once the arm is tightened, it should look like the photo.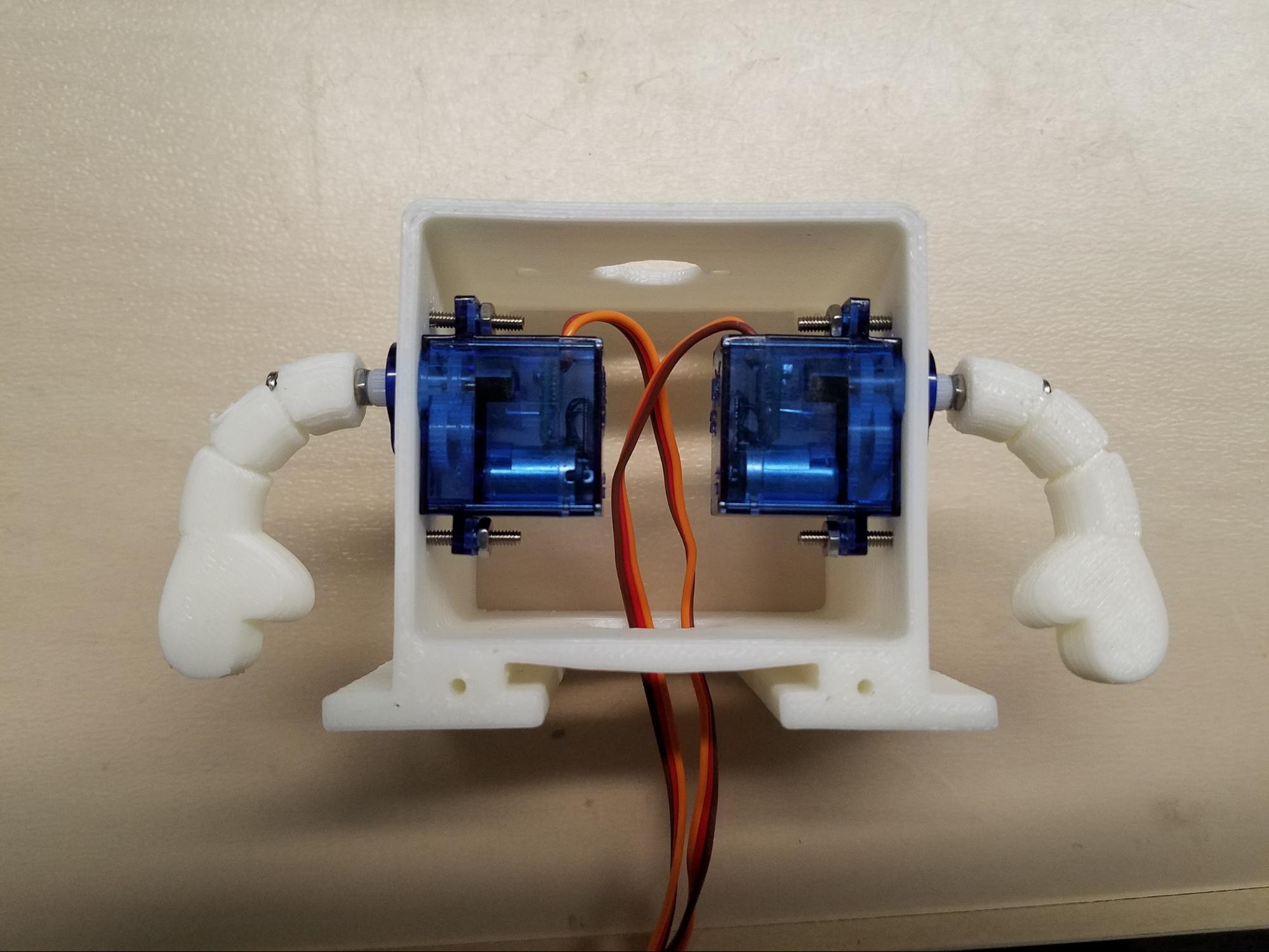 Now, repeat the process above for the other arm too. Once you are finished, your robot arms should look like the photo.
Now, repeat the process above for the other arm too. Once you are finished, your robot arms should look like the photo. Find the bottom of your head (i.e. the base) and align the hole to the top of the hole on the servo motor shaft head. (See photo.)
Find the bottom of your head (i.e. the base) and align the hole to the top of the hole on the servo motor shaft head. (See photo.)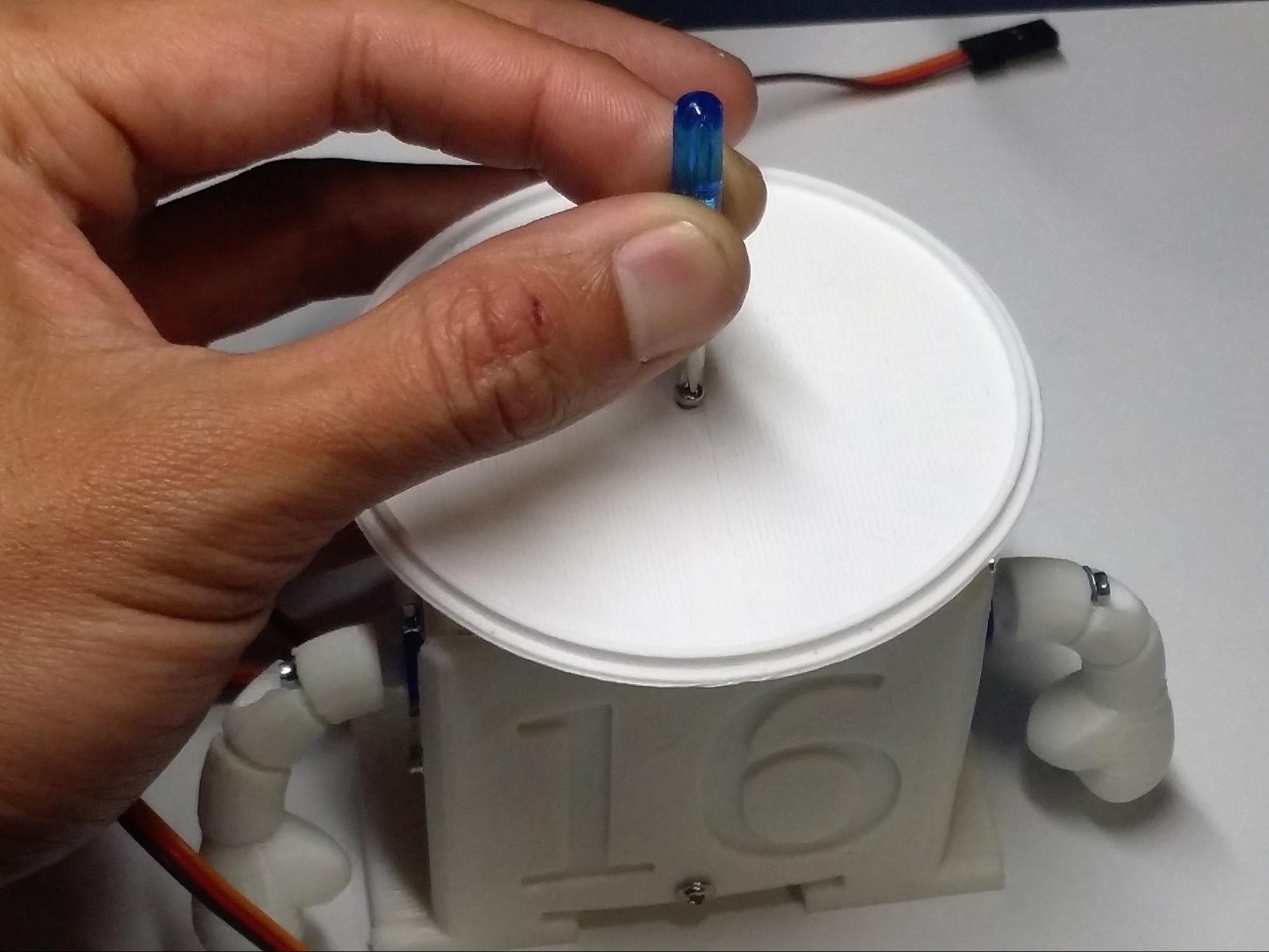 Fasten the screw.
Fasten the screw.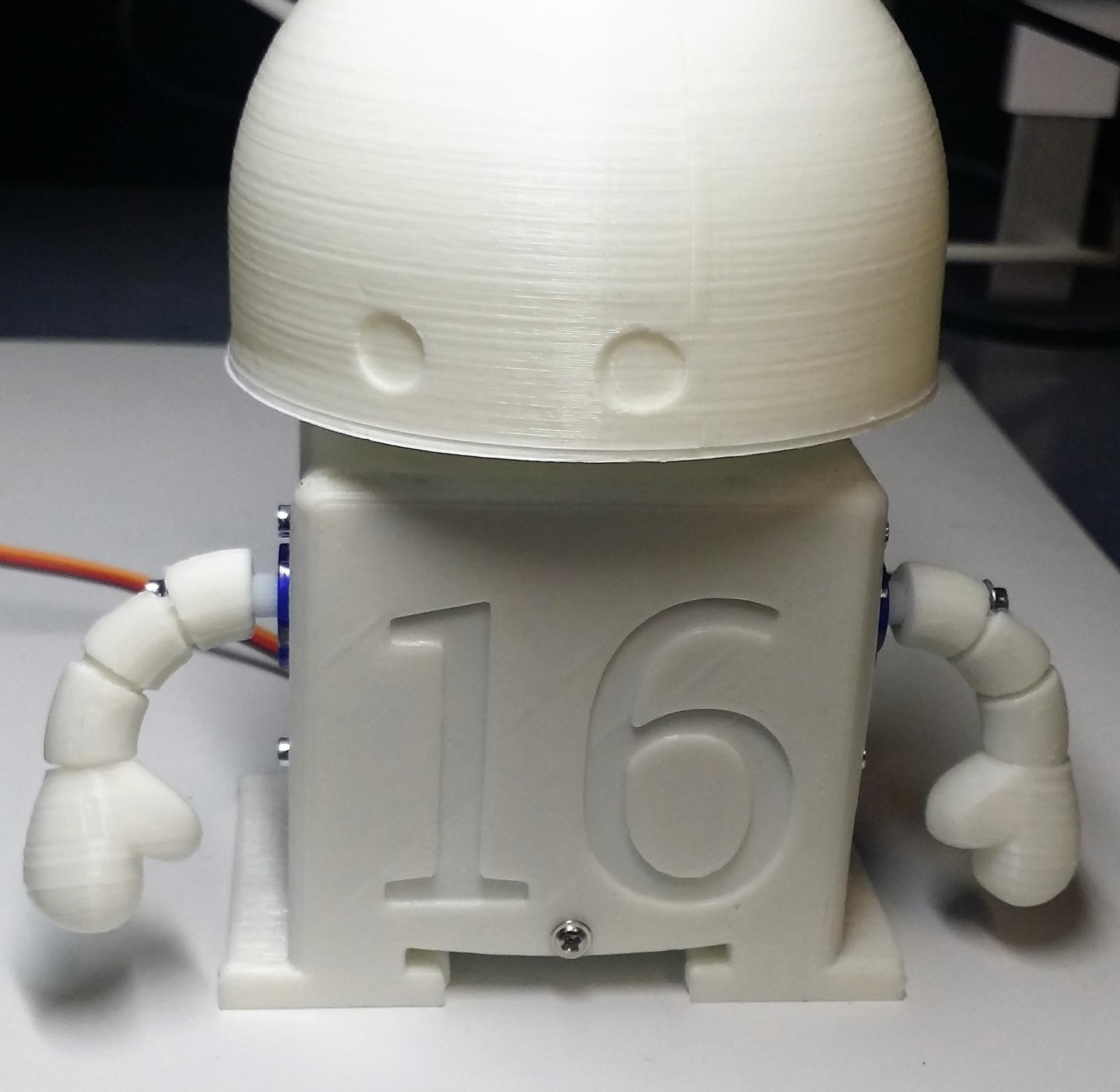 Now fasten the top of the head to the bottom part. It should fit in over the top. You may want to use glue (Elmer’s glue or super glue) to secure it further.
Now fasten the top of the head to the bottom part. It should fit in over the top. You may want to use glue (Elmer’s glue or super glue) to secure it further.
