- PAGE SETTINGSClick on the gear to simplify view
- Settings

Lesson Plan
Overview
In this section we’ll combine everything to program our car to move and avoid objects
Full Tutorial Video
Stop Before We Crash
Let’s program our car to stop before we hit a wall. We’ll use what we have learned about the ultrasonic sensor to program our robot to do this.
Turn Before We Crash
Let’s program our car to not only stop before we hit a wall, but also turn to avoid it!
#include <Servo.h>
int trig = 3;
int echo = 4;
int led = 7;
int button = 2;
int mA = 10;
int mB = 11;
Servo motorA;
Servo motorB;
// float so that we can handle decimals
float speedOfSoundMetersPerSec = 343;
float duration_microSeconds;
float duration_seconds;
float distance_meters;
float distance_cm;
void setup() {
// put your setup code here, to run once:
pinMode(trig,OUTPUT);
pinMode(echo,INPUT);
pinMode(led,OUTPUT);
pinMode(button,INPUT);
motorA.attach(mA);
motorB.attach(mB);
stop();
Serial.begin(9600);
}
/*************************/
/***** car movements *****/
/*************************/
void stop() {
motorA.write(90);
motorB.write(90);
}
void backward() {
motorA.write(180);
motorB.write(0);
}
void forward() {
motorA.write(0);
motorB.write(180);
}
void turnRight() {
motorA.write(90);
motorB.write(180);
delay(500);
stop();
}
void turnLeft() {
motorA.write(0);
motorB.write(90);
delay(500);
stop();
}
/***********************/
/**** ultrasonic *******/
/***********************/
float ultrasonic() {
// reset the ultrasonic sensor
digitalWrite(trig,LOW);
delayMicroseconds(5);
// send a 10 microsecond pulse out through the trigger
digitalWrite(trig, HIGH);
delayMicroseconds(10);
digitalWrite(trig, LOW);
// wait for the response and store it in duration. It will return in microseconds.
duration_microSeconds = pulseIn(echo,HIGH);
// convert duration to seconds
duration_seconds = duration_microSeconds / 1000000;
// get distance traveled in meters. distance = (speed * time)/2
distance_meters = (speedOfSoundMetersPerSec * duration_seconds)/2;
// convert to cm
distance_cm = distance_meters*100;
//Serial.println(distance_cm);
return distance_cm;
}
void loop() {
//wait here until you press the button
while(digitalRead(button)==HIGH) {
//do nothing
}
//move forward
forward();
//keep moving forward WHILE I am more than 5 cm away from the wall
while (ultrasonic() > 4) {
forward();
}
stop();
delay(1000);
backward();
delay(500);
turnRight();
}
This code will make the robot turn right if it sees an object less than 20 cm away, otherwise it will move forward. Try it out!
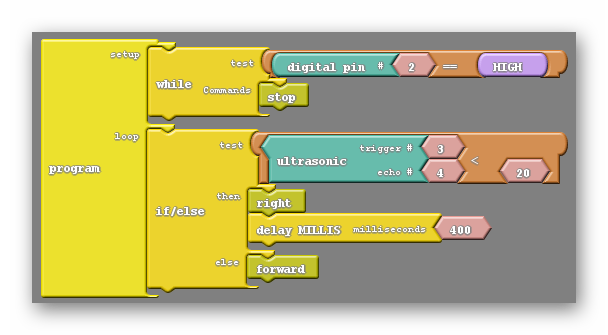
Note: The 400 ms delay after the right subroutine determines how long it will turn right for before moving on to the next section of code.
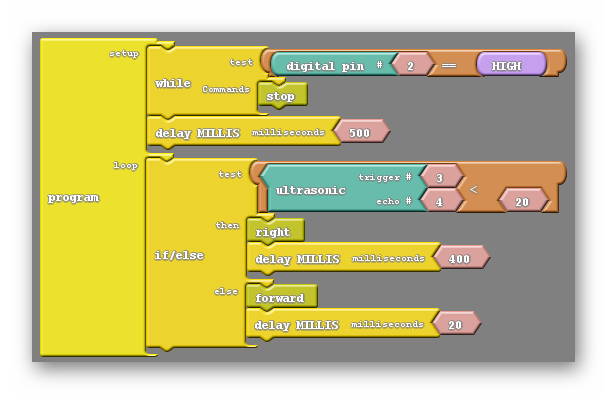
Adding Delays
Let’s add some delays into our code to increase our performance.
- Adding a 500 ms delay after the while loop will give us time to remove our hand from the robot after pressing it. This is to help prevent us from accidently bumping the robot off its course.
- Adding a 20 ms delay after the forward subroutine adds a little time for the code to rest before it loops back to the ultrasonic part of the code. Without the rest, the ultrasonic sensor may malfunction from time to time by getting overloaded by requests.
Improving Our Ultrasonic Sensor’s Performance
As your robot’s battery gets drained, it’s a known issue that the ultrasonic sensor will begin responding with 0 even when there is something in front of it. We can actually take care of this through code by ignoring 0 values. The AND block helps us do this.
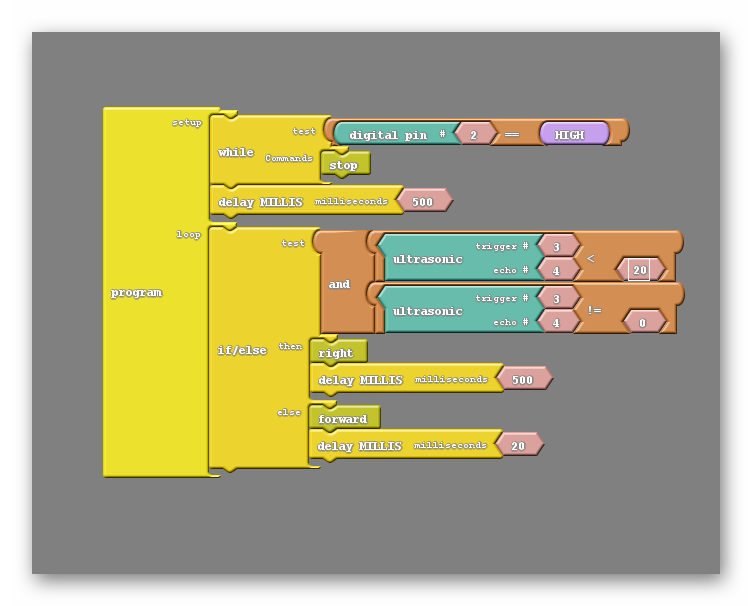
Note: In the code above, the robot will turn right ONLY if the ultrasonic sensor sees a value that is less than 20 AND it’s not 0.